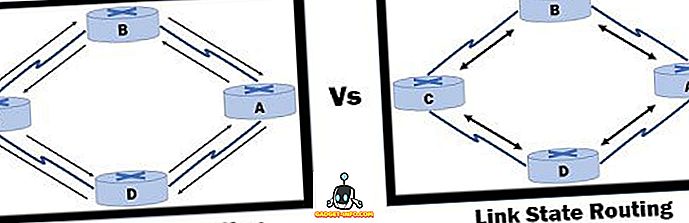
Предварителната разлика между маршрутизирането на вектора на разстоянието и състоянието на връзката е, че при маршрутизирането на дистанционния вектор маршрутизаторът споделя знанията за цялата автономна система, докато при маршрутизирането на състоянието на връзката рутерът споделя знанията само на техните съседни маршрутизатори в автономната система.
Сравнителна таблица
| Основа за сравнение | Дистанционно векторно маршрутизиране | Маршрутизиране на състоянието на връзката |
|---|---|---|
| алгоритъм | Белман брод | Dijsktra |
| Мрежов изглед | Топологична информация от гледна точка на съсед | Пълна информация за топологията на мрежата |
| Най-доброто изчисление на пътя | Въз основа на най-малък брой хмел | Въз основа на цената |
| Актуализациите | Пълна таблица за маршрутизация | Актуализации на състоянието на връзката |
| Актуализира честотата | Периодични актуализации | Задействани актуализации |
| CPU и памет | Ниска степен на използване | интензивен |
| простота | Висока простота | Изисква обучен мрежов администратор |
| Време за конвергенция | умерен | Бърз |
| Актуализациите | При излъчване | На мултикаст |
| Йерархична структура | Не | да |
| Междинни възли | Не | да |
Определяне на дистанционно векторно маршрутизиране
При маршрутизирането на дистанционни векторни маршрутизатори не е необходимо да познават целия път към всеки мрежов сегмент; изисква само да знаете посоката или вектора, в който да изпратите пакета. Техниката определя посоката (вектор) и разстоянието (броя на хоп) към всяка мрежа в мрежата.
Алгоритмите за маршрутизиране на дистанционни вектори периодично изпращат всички или част от тяхната таблица за маршрутизация на съседните си съседи. Маршрутизаторите, които изпълняват протокол за маршрутизиране на векторни разстояния, автоматично ще изпращат периодични актуализации, дори ако няма промени в мрежата.
Маршрутизаторът може да провери всички известни маршрути и да промени своята местна таблица за маршрутизация въз основа на актуализираната информация, получена от съседното маршрутизиране. Този процес се нарича "маршрутизиране чрез слух", защото информацията за маршрутизация, която маршрутизаторът има за топологията на мрежата, се основава на перспективата на маршрутизиращата таблица на съседния рутер.
RIP и IGRP е често използван протокол за разстояния, който използва брояч на хоп или неговите показатели за маршрутизация.
Определяне на маршрутизиране на състоянието на връзката
При маршрутизиране на състоянието на връзката всеки рутер се опитва да изгради своя собствена вътрешна карта на топологията на мрежата. В началния етап на стартиране, когато рутерът стане активен, той изпраща съобщенията в мрежата и събира информацията от маршрутизаторите, към които е пряко свързана. Той също така предоставя информация за това дали връзката за достигане до рутера е активна или не. Тази информация се използва от други маршрутизатори за изграждане на карта на топологията на мрежата. След това рутерът използва картата, за да избере най-добрия път.
Протоколите за маршрутизиране на състоянието на връзката реагират бързо на промените в мрежата. Той изпраща задействани актуализации, когато настъпи промяна в мрежата и изпраща периодични актуализации на дълги интервали от време, например 30 минути. Ако връзката променя състоянието, устройството открива, че промяната генерира и разпространява съобщение за актуализация относно тази връзка към всички маршрутизатори. След това всеки рутер взема копие от съобщението за обновяване и актуализира своята маршрутизираща таблица и препраща съобщението до целия съседен рутер.
Това наводнение на съобщението за актуализация е необходимо, за да се гарантира, че всички рутери актуализират своята база данни, преди да създадат таблица за маршрутизиране на актуализации, която отразява новата технология. Протоколът OSPF е пример за маршрутизиране на състоянието на връзката.
Основни разлики между дистанционно векторно маршрутизиране и маршрутизиране на състоянието на връзката
- Алгоритъмът на Bellman-Ford се използва за маршрутизиране на векторни разстояния, докато Dijsktra се използва за извършване на маршрута на състоянието на връзката.
- При маршрутизирането на дистанционни векторни маршрутизатори получават топологична информация от гледна точка на съсед. Напротив, при маршрутизирането на връзката рутерът получава пълна информация за топологията на мрежата.
- Маршрутът на дистанционния вектор изчислява най-добрия маршрут въз основа на разстоянието (най-малкото количество хмел). В сравнение с това, маршрутизирането на състоянието на връзката изчислява най-добрия маршрут въз основа на най-ниската цена.
- Маршрутът на състоянието на връзката актуализира само състоянието на връзката, докато маршрутизацията за дистанционно векторно актуализиране пълна таблица за маршрутизация.
- Честотата на обновяване и в двете техники за маршрутизация е различно обновяване на векторно разстояние периодично, докато честотата на обновяване на състоянието на връзката използва задействани актуализации.
- Използването на процесора и паметта при маршрутизиране на векторни разстояния е по-ниско от маршрутизацията на състоянието на връзката.
- Маршрутизацията на векторни разстояния е лесна за изпълнение и управление. Обратно, маршрутизацията на състоянието на връзката е сложна и изисква обучен мрежов администратор.
- Времето за конвергенция при маршрутизиране на векторни разстояния е бавно и обикновено страда от проблем с отчитане до безкрайност. Обратно, времето за конвергенция в маршрута на състоянието на връзката е бързо и е по-надеждно.
- Дистанционният вектор няма йерархична структура, докато при маршрутизиране на състоянието на връзките възлите могат да имат йерархична структура.
заключение
В дистанционния вектор, маршрутизиране на маршрутизиращия дял, информацията за цялата автономна система и информацията се споделя само със съседите. От друга страна, при маршрутизирането на връзката маршрутизаторите споделят знанията само за своите съседи и информацията се споделя с всички маршрутизатори.